|
Опрос
|
реклама
Быстрый переход
Роботы научились копировать человеческие навыки, просто наблюдая за людьми
19.05.2026 [17:55],
Павел Котов
Человек может учиться определённым действиям как у других людей, так и, в отдельных случаях, у животных. Роботов можно программировать на определённые последовательности действий, а повторение навыков человека и других машин — задача более сложная, поскольку роботы могут отличаться по строению. Решение этой задачи предложили инженеры Федеральной политехнической школы Лозанны (EPFL, Швейцария). 
Источник изображений: actu.epfl.ch Учёные Лаборатории алгоритмов и систем обучения (LASA) при EPFL разработали новую технологию, позволяющую роботам имитировать человеческую деятельность, что избавляет операторов настраивать код под робота каждого типа. В области исследований и в промышленности такая система обеспечит значительную экономию средств и времени. Кинематический интеллект — новый подход к обучению на основе демонстрации (Learning-from-Demonstration, LfD) — позволяет роботам, имеющим разное строение, приобретать новые навыки, наблюдая за одной и той же демонстрацией, которую проводит выступающий учителем человек. 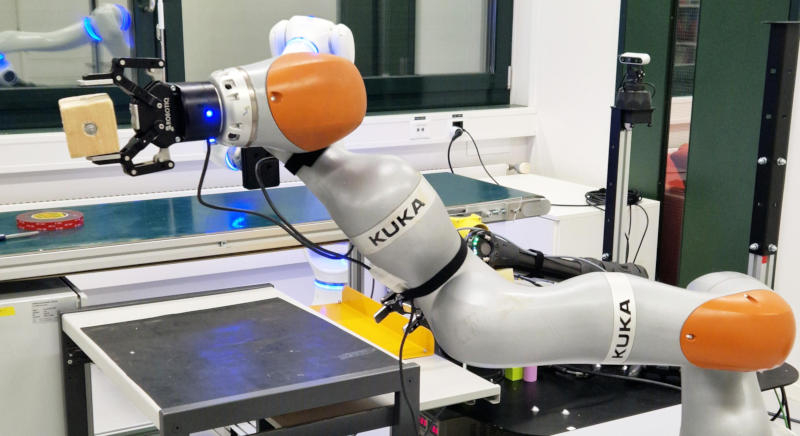 От существующих решений кинематический интеллект отличается тем, что наблюдаемые действия преобразуются в стратегию, адаптирующуюся к индивидуальным ограничениям суставов и движениям каждого робота, а также к другим его физическим ограничениям и преимуществам. После обучения на нескольких демонстрациях или даже на одной выступающие в роли учеников роботы при помощи «глобально стабильной динамической системы» успешно выполнили новые задачи. «Каждый робот овладел разными этапами задачи, и система успешно работала даже при изменении распределения шагов. Каждый робот интерпретирует один и тот же навык по-своему, но всегда в безопасных и выполнимых пределах», — прокомментировал проект один из его авторов Ститхпрагья Гупта (Sthithpragya Gupta). 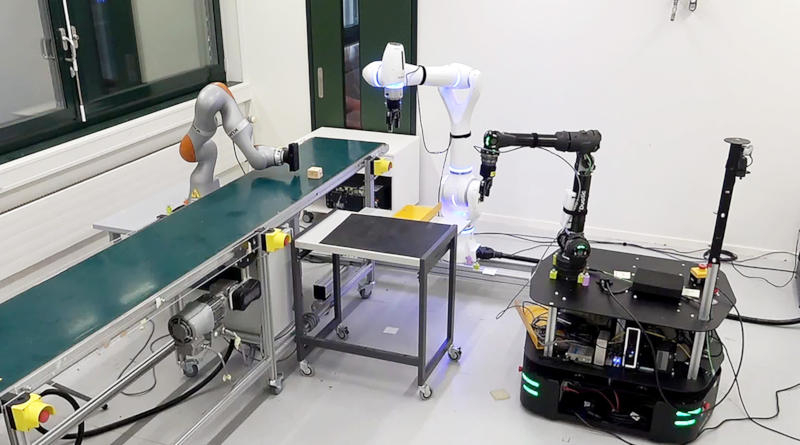 Работа над проектом началась с того, что исследователи EPFL произвели захват движений людей, которые устанавливали, толкали, бросали предметы или выполняли с ними другие действия. Далее они построили систему классификации физических ограничений роботов, зафиксировав пределы равновесия и диапазон движений суставов, и объединили эту систему с данными захвата движений в процессе разработки собственной системы наблюдения и адаптационного обучения роботов. В ходе экспериментов после наблюдения за людьми три разных коммерческих робота научились перемещать деревянные блоки с конвейерной ленты на рабочую платформу, ставить их на столы и бросать в контейнеры. На следующем этапе исследователи хотят обучить роботов выполнять задачи не по задаваемому человеком образцу, а по словесным описаниям: «пользователь предлагает идею и желаемое поведение, а робот должен позаботиться обо всём остальном». В Швейцарии придумали роборуку, которая может отсоединяться от манипулятора и самостоятельно ползать
28.09.2024 [16:14],
Владимир Мироненко
Разработчики Федеральной политехнической школы Лозанны (EPFL, Швейцария) представили на Международной конференции по робототехнике и автоматизации (ICRA) шарнирную роботизированную руку, способную расширить радиус действия, отсоединяясь и самостоятельно перемещаясь к предмету, чтобы его взять. 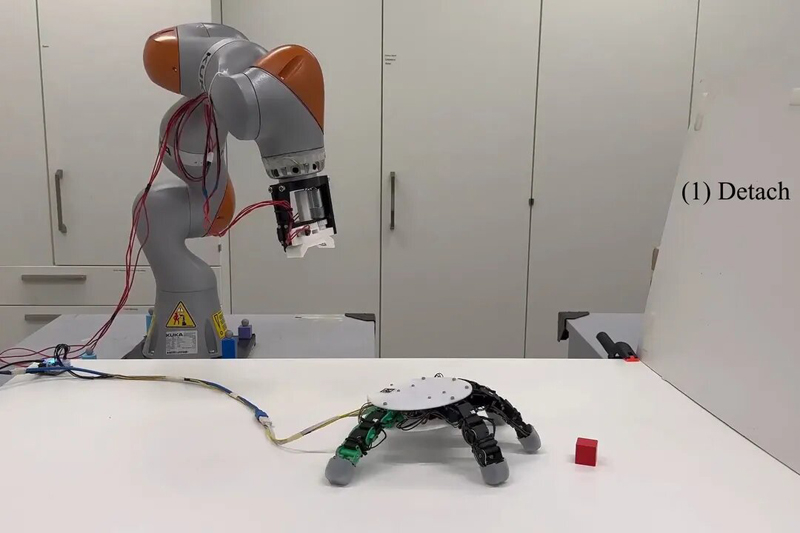
Источник изображения: EPFL Роботизированные руки обычно прикреплены к основанию на полу или другим конструкциям для дополнительной устойчивости, что ограничивает радиус их действия. Целью исследования, проведённого в Лаборатории алгоритмов и систем обучения EPFL (LASA), была разработка бимодальной роботизированной руки с расширенными возможностями захвата, включая периодическую независимость от руки, к которой она прикреплена. Роборуки обычно создаются с одной целью: удерживать и перемещать предметы. Чтобы разработать роботизированную руку, которая могла бы делать это, перемещаясь самостоятельно, исследователи сгенерировали и усовершенствовали базовую конструкцию с помощью генетического алгоритма, который опирается на биологические приёмы, и физического симулятора MuJoCo для проверки дееспособности прототипа. Исследователи определили оптимальное положение и количество необходимых сочленённых пальцев — их оказалось пять, как у человека. Пальцы руки могут сгибаться в двух направлениях, что позволяет ей не только «ползать», но и захватывать два предмета одновременно, будучи прикреплённой к конечности роботизированного манипулятора. Она также может использовать несколько пальцев для подъёма предметов, в то время как остальные функционируют в качестве опоры. Роботизированная рука также имеет магнитный крепление на «запястье». Если добавить такую шарнирную роботизированную руку, например, к роботу Spot, то его можно будет использовать для исследования или анализа областей, которые сейчас недоступны из-за габаритов и ограниченной манёвренности. |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.







 MWC 2018
MWC 2018 2018
2018 Computex
Computex



