|
Опрос
|
реклама
Быстрый переход
Создан летающий робот без единого пропеллера — он словно птица парит в восходящих потоках
23.06.2026 [15:54],
Геннадий Детинич
Учёные из Института интеллектуальных систем Общества Макса Планка в Тюбингене (Max Planck Institute for Intelligent Systems) и Штутгартского университета (University of Stuttgart) представили летающего робота Floaty, который держится в воздухе не за счёт винтов, а за счёт восходящего потока воздуха. Такой полёт требует намного меньше энергии по сравнению с коптерами и даже самолётами, а также может быть воплощён в управлении ракетами и метеозондами. 
Источник изображения: Max Planck Institute for Intelligent Systems Разработка воспроизводит аэродинамику птиц, использующих восходящие потоки воздуха: робот меняет аэродинамическую форму «оперения» и тем самым перераспределяет сопротивление воздушному потоку, чтобы зависать и даже маневрировать при минимальном расходе энергии своих аккумуляторов. Робот Floaty оснащён четырьмя независимо управляемыми створками в верхней части корпуса. Поворачивая их, система изменяет эффективную площадь, обтекаемую воздушным потоком, и тем самым управляет подъёмной силой, креном, тангажом и рысканием. В отличие от квадрокоптера, робот не создаёт тягу: подъёмная сила фактически берётся из внешнего восходящего потока, а бортовые сервоприводы лишь меняют конфигурацию створок. Для управления использована экспериментально обученная аэродинамическая модель, позволяющая рассчитывать команды для створок и стабилизировать аппарат в условиях шести степеней свободы. 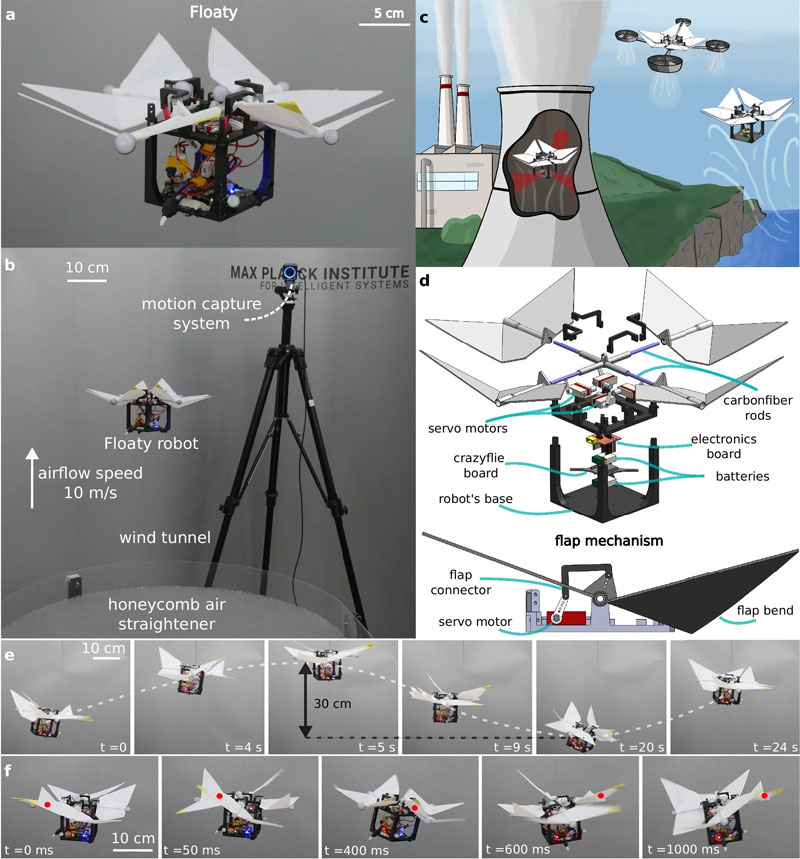
Источник изображения: Nature 2025 Ключевой инженерной проблемой была устойчивость в воздухе. Чтобы робот не заваливался набок, его центр масс опустили примерно на 7 см ниже плоскости створок, а сами створки выполнили с изгибом под углом 42,5°. В испытаниях в вертикальной аэродинамической трубе диаметром 1,2 м робот парил при скоростях потока 8–11 м/с, а его положение отслеживалось системой OptiTrack с частотой 200 Гц, тогда как управляющие команды передавались ему по радиоканалу. В экспериментах Floaty массой 340 г зависал в рабочей зоне, выдерживал толчки и боковой поток со скоростью до примерно 4 м/с, то есть около 40 % от скорости основного вертикального потока. При питании от двух LiPo-аккумуляторов ёмкостью 250 мА·ч он держался в воздухе в среднем около 33 минут, потребляя примерно 3,4 Вт, что соответствует около 10 Вт/кг. Для сравнения, обычные мультикоптеры при зависании обычно требуют порядка 100–250 Вт/кг. Потенциальные области применения представленной схемы — инспекция дымовых труб и других промышленных объектов с сильными восходящими потоками, управление полезной нагрузкой метеозондов, наведение ракет при входе в атмосферу, а в перспективе — создание гибридных аппаратов, сочетающих пассивное парение с активной тягой. Учёные создали летающего робота, вдохновлённого жуком-носорогом — он машет крыльями в полёте и складывает их при отдыхе
05.08.2024 [20:18],
Сергей Сурабекянц
Учёные из Федеральной политехнической школы Лозанны и Университета Конкук создали миниатюрного летающего робота, вдохновляясь способностью насекомых прижимать крылья к телу в состоянии покоя и раскрывать их для полёта. Они считают, что такой робот «может использоваться для поисково-спасательных операций в ограниченном пространстве. Когда полет невозможен, робот может сесть на любую поверхность, а затем переключиться на другие режимы передвижения». 
Источник изображений: techxplore.com Идея создания робота по образу животного не нова. Люди веками наблюдают за чудесами природы и вдохновляются ими для собственных изобретений. Существует отдельная наука — бионика, и её подраздел — биомиметика, в основе которой лежит принцип заимствования у животных идей и основных элементов для новых технологий. Например, группа инженеров Северо-Западного университета спроектировала крошечного робота-краба размером меньше блохи, способного ползать, сгибаться и даже прыгать. Робот-дрон по образу пчелы имитирует тактику насекомых для экономии заряда батареи. Однако учёные, создавшие миниатюрного летающего робота, похожего на жука-носорога, утверждают, что их робот уникален, так как умеет складывать крылья в состоянии покоя и раскрывает их, чтобы взлететь. Разработанный исследователями летающий микроробот с раскладывающимися маховыми крыльями весит 18 грамм и примерно в два раза крупнее настоящего жука-носорога. Ранее считалось, что, что насекомые, включая жуков, используют грудные мышцы для развёртывания и втягивания крыльев, подобно птицам и летучим мышам. Попытки имитировать эти действия при создании роботов в прошлом были сосредоточены на воспроизведении динамики крыльев жуков с использованием структур, похожих на оригами, без учёта движений у основания задних крыльев. Исследователь Хоанг-Ву Фан (Hoang-Vu Phan) обнаружил, что жук-носорог использует свои надкрылья и силы взмахов, чтобы развернуть задние крылья для полёта. Затем, как только насекомое прекращает полёт и приземляется на поверхность, оно использует надкрылья, чтобы «оттолкнуть» задние крылья обратно на своё тело. Оба действия являются пассивными по своей природе и не требуют использования грудных мышц, которые поддерживают полёт птиц и летучих мышей.  «Внедрив этот пассивный механизм в роботов с машущими крыльями, мы впервые продемонстрировали, что в отличие от существующих роботов, которые фиксируют свои крылья в полностью выдвинутой конфигурации, наш робот может складывать крылья вдоль тела в состоянии покоя», — сообщил Фан. «Для простоты мы использовали эластичные сухожилия, установленные в подмышках, которые позволяют роботу пассивно складывать крылья, — рассказал он. — Активируя взмах, робот может пассивно раскрыть крылья, чтобы взлететь и поддерживать стабильный полет. […] после приземления крылья быстро и пассивно убираются обратно в корпус без необходимости использования каких-либо дополнительных приводов». Идея разработчиков заключается в том, что роботов со складывающимися крыльями можно использовать для поисково-спасательных операций в замкнутых пространствах. Примером может служить вход в обрушившееся здание, куда люди не могут попасть. Оказавшись внутри здания, робот может приземлиться, сложить крылья, а затем передвигаться шагом или ползком. Летающий робот-жук в настоящее время проходит цикл испытаний с весьма многообещающими результатами. По окончании тестирования учёные планируют доработать робота и проверить его функционирование в различных реальных сценариях. Учёные разработали дрон PercHug, который приземляется на деревья, как летучая мышь
18.07.2024 [12:13],
Анжелла Марина
Швейцарские инженеры разработали беспилотный летательный аппарат (БПЛА) самолётного типа , которому не нужна взлётно-посадочная полоса. Всё, что нужно роботизированному БПЛА — это столбы или деревья, за которые он цепляется своими гибкими крыльями как летучая мышь или сова. 
Источник изображения: Nature Вдохновлённые ловкостью летучих мышей и сов, исследователи из Федеральной политехнической школы Лозанны (EPFL) в Швейцарии оснастили дрон шарнирными крыльями двойного назначения, которые могут быть как жёсткими для полёта, так и гибкими для захвата опоры. PercHug весом всего 550 грамм имеет «конструкцию с загнутым носом» которая помогает ему автоматически принимать вертикальное положение при обнаружении препятствия. Соприкосновение с препятствием одновременно ослабляет и натяжной трос, активируя пружинный механизм, разворачивающий крылья вокруг опоры, поясняет The Verge, ссылаясь на опубликованную в журнале Nature статью учёных. 
Источник изображения: Nature Уникальная конструкция PercHug позволяет отказаться от традиционных посадочных механизмов, делая его более лёгким, но при этом увеличивая потенциальную грузоподъёмность и дальность полёта. В ходе испытаний PercHug продемонстрировал 73 % успешных приземлений на деревья и столбы после короткого планирования. Однако, прежде чем БПЛА можно будет использовать для размещения дорогостоящего оборудования, такого как датчики и камеры, необходимо повысить процент успешных посадок, признают разработчики. 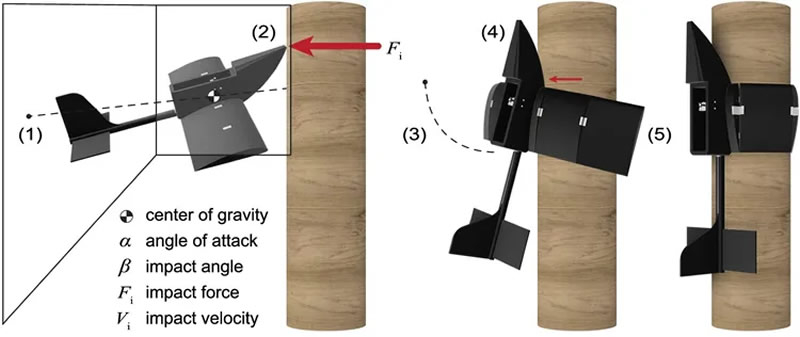
Источник изображения: Nature В настоящее время PercHug представляет собой просто планер, запускаемый вручную и не имеющий системы управления. В будущем учёные планируют оснастить его электронной пилотажно-навигационной системой и датчиками управления, а также разработать механизм, позволяющий ему самостоятельно отцепляться от опоры для продолжения полёта. Потенциально планер может быть использован для мониторинга окружающей среды, проведения инспекций инфраструктуры и выполнения спасательных операций в труднодоступных местах. |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.







 MWC 2018
MWC 2018 2018
2018 Computex
Computex



